Edge detect filters search for borders between different colors
and so can detect contours of objects.
They are used to make selections and for many artistic purposes.
Most of them are based on gradient calculation methods and give thick
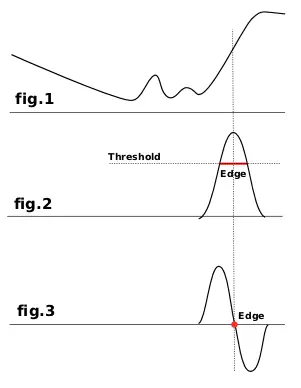
border lines. Look at fig.1 which represents color intensity
variations. On the left is a slow color gradient which is not a border.
On the right is a quick variation which is an edge. Now, let us
calculate the gradient, the variation speed, of this edge, i.e the first
derivative (fig.2). We have to decide that a border is detected when
gradient is more than a threshold value (the exact border is at top of
the curve, but this top varies according to borders). In most cases,
threshold is under top and border is thick.
The Laplacian edge detection uses the second derivative (fig.3).
The top of the curve is now at zero and clearly identified. That's
why Laplace filter renders a thin border, only a pixel wide. But
this derivative gives several zeros corresponding to small
ripples, resulting in false edges.
Some blurring before applying edge filters is often necessary: it
flattens small ripples in signal and so prevents false edges.